En este post se explica qué son los mecanismos y para qué sirven. Así que encontrarás el significado de mecanismo, ejemplos de mecanismos y cuáles son los diferentes tipos de mecanismos.
Índice
¿Qué es un mecanismo?
Un mecanismo es un conjunto de elementos mecánicos que permiten realizar un trabajo al ser humano haciendo menos esfuerzo y de manera más cómoda.
En concreto, los mecanismos son dispositivos que, mediante un sistema de transmisión, transforman una fuerza o un movimiento.
Por lo tanto, la función de un mecanismo es facilitar el trabajo al ser humano, ya que los mecanismos sirven para conseguir fuerzas o movimientos que resultaría muy difíciles o incluso imposible sin ellos.
Por ejemplo, el sistema de mecanismos de un automóvil permiten hacerlo avanzar apretando el acelerador y moviendo la palanca de cambio de marchas. De manera que el mecanismo del vehículo transforma el trabajo realizado por el ser humano en un movimiento de avance.
En definitiva, un mecanismo es un conjunto de partes de una máquina que transforma una fuerza o un movimiento de entrada en una fuerza o un movimiento de salida deseado.
Ejemplos de mecanismos
Una vez hemos visto la definición de mecanismo, vamos a ver varios ejemplos de mecanismos para entender mejor el concepto.
- Mecanismo biela-manivela: mecanismo que sirve para transformar un movimiento lineal en un movimiento circular y viceversa.
- Mecanismo leva-seguidor: mecanismo no reversible que convierte un movimiento giratorio en un movimiento lineal oscilatorio.
- Mecanismo tornillo sin fin: mecanismo que se usa para transmitir un movimiento de giro entre dos ejes perpendiculares.
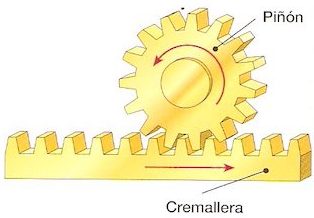
- Mecanismo piñón-cremallera: mecanismo reversible que permite pasar de un movimiento circular a un movimiento lineal.
- Ruedas de fricción: mecanismo que permite transmitir un movimiento de giro mediante fricción.
- Polipasto: mecanismo formado por un conjunto de poleas que sirve para manipular objetos pesados con comodidad.
- Ruedas dentadas: mecanismo que se usa para transmitir una velocidad angular y una potencia entre dos ejes.
Tipos de mecanismos
Mecanismo de transmisión lineal
Los mecanismos de transmisión lineal son aquellos mecanismos que se les aplica un movimiento lineal y, como respuesta, generan otro movimiento lineal. Por lo tanto, este tipo de mecanismos transmiten un movimiento rectilíneo.
Por ejemplo, la palanca es un mecanismo de transmisión lineal porque su funcionamiento consiste en mover uno de sus extremos hacia abajo (movimiento lineal) y, en consecuencia, el otro brazo de la palanca con la carga se mueva hacia arriba (movimiento lineal). De modo que es un mecanismo que transmite un movimiento lineal.
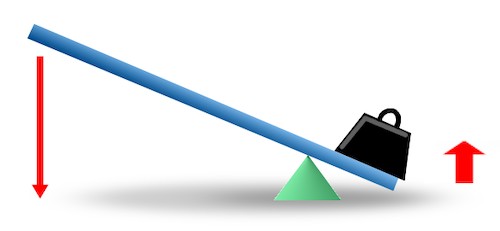
En general, este tipo de mecanismos se utilizan para modificar la fuerza de entrada, permitiendo así ejercer una fuerza mucho mayor que la fuerza aplicada. Siguiendo el ejemplo anterior, una balanza permite levantar un objeto pesado haciendo una fuerza menor que si se tuviera que levantar el peso sin el instrumento mecánico.
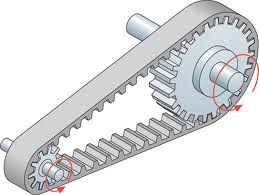
Mecanismo de transmisión circular
Los mecanismos de transmisión circular son aquellos mecanismos que tienen un movimiento circular como entrada y, asimismo, tienen un movimiento circular en la salida. De modo que este tipo de mecanismos transmiten un movimiento de rotación.
Así pues, la diferencia entre un mecanismo de transmisión circular y un mecanismo de transmisión lineal es simplemente el tipo de movimiento que transmiten. Un mecanismo de transmisión circular transmite un movimiento de rotación, mientras que un mecanismo de transmisión lineal transmite un movimiento rectilíneo.
Por ejemplo, un sistema de poleas unidas por una correa es un mecanismo de transmisión circular, ya que el movimiento de giro de la polea de entrada se transfiere a la polea de salida.

Este tipo de mecanismos tienen la función de modificar la velocidad angular, de manera que al transmitir el movimiento circular se aumenta o se reduce la velocidad de giro según convenga.
Para ello, se juega con el diámetro de la rueda de entrada y el diámetro de la rueda de salida: si el diámetro de entrada es mayor que el de salida, se aumenta la velocidad angular, en cambio, si el diámetro de entrada es menor que el diámetro de salida, se reduce la velocidad angular.
Las ruedas dentadas con una cadena, conocidas como mecanismo piñón-cadena, también son un mecanismo de transmisión circular. La ventaja de las cadenas es que son más eficientes, sin embargo, son menos flexibles que las correas.
Por último, los engranajes también son mecanismos de transmisión circular, ya que son ruedas dentadas cuyos dientes encajan entre sí y, en consecuencia, se transmite el movimiento circular de una rueda a la otra.
Principalmente, se distinguen tres tipos de engranajes: los engranajes rectos cuyos ejes son paralelos, los engranajes cónicos cuyos ejes son perpendiculares y los engranajes helicoidales cuyos dientes son helicoidales.
Engranajes rectos

Engranajes cónicos

Engranajes helicoidales

Mecanismo de transformación del movimiento
Los mecanismos de transformación del movimiento convierten el movimiento de entrada en otro tipo de movimiento, de manera que el movimiento de entrada y el movimiento de salida son diferentes.
Básicamente, estos tipos de mecanismos transforman un movimiento circular en un movimiento lineal, o al revés, convierten un movimiento circular en un movimiento lineal.
Por ejemplo, el mecanismo de leva-seguidor sirve para transformar un movimiento circular en un movimiento lineal alternativo. Este tipo de mecanismo es irreversible, lo que significa que permite pasar de un movimiento circular a un movimiento lineal, pero no al revés.
De manera similar, el mecanismo piñón-cremallera sirve para convertir un movimiento de avance en un movimiento giratorio. Este tipo de mecanismo sí que es reversible, por lo que también permite transformar un movimiento circular en un movimiento lineal.
Ventaja mecánica de un mecanismo
La ventaja mecánica de un mecanismo es la relación entre la fuerza de salida y la fuerza de entrada del mecanismo. Por lo tanto, la ventaja mecánica es igual al cociente entre la fuerza de salida y la fuerza de entrada.
De modo que la fórmula para calcular la ventaja mecánica de un mecanismo es la siguiente:

La ventaja mecánica de un mecanismo también se puede calcular dividiendo la velocidad de la fuerza aplicada entre la velocidad con la que se desplaza la carga. Asimismo, esta expresión también equivale al desplazamiento del punto de la fuerza aplicada partido por el desplazamiento de la carga:

Donde:
 es la ventaja mecánica.
es la ventaja mecánica. es la fuerza de salida.
es la fuerza de salida. es la fuerza de entrada.
es la fuerza de entrada. es la velocidad de entrada.
es la velocidad de entrada. es la velocidad de salida.
es la velocidad de salida. es la distancia recorrida por la entrada.
es la distancia recorrida por la entrada. es la distancia recorrida por la salida.
es la distancia recorrida por la salida.
Por otro lado, si queremos transmitir un momento en lugar de una fuerza, la ventaja mecánica se calcula dividiendo el momento de salida entre el momento de entrada. Por ejemplo, la ventaja mecánica de los engranajes de ruedas se mide con la relación del momento transmitido.

Donde:
- es la ventaja mecánica.
 es el momento de salida.
es el momento de salida. es el momento de entrada.
es el momento de entrada. es la velocidad angular de entrada.
es la velocidad angular de entrada. es la velocidad angular de salida.
es la velocidad angular de salida.
Entonces, a partir de la fórmula de la ventaja mecánica, se pueden deducir las siguientes relaciones:
- VM>1: la fuerza de salida es mayor que la fuerza aplicada, por lo tanto, el mecanismo aumenta la magnitud de la fuerza. Por contra, la distancia recorrida por la carga es menor que la distancia recorrida por el el punto en el que se aplica la fuerza.
- VM<1: la fuerza de salida es menor que la fuerza aplicada, de modo que el mecanismo reduce el valor de la fuerza. Sin embargo, se logra un desplazamiento de la carga más grande que el desplazamiento realizado en el punto de aplicación de la fuerza.
- VM=1: la fuerza de salida del mecanismo es igual a la fuerza que se ejerce sobre ella. Los desplazamientos de la carga y del punto de aplicación de la fuera también son idénticos. Aunque este tipos de mecanismos no tienen una ventaja mecánica, se suelen utilizar para hacer la fuerza de manera más cómoda. Por ejemplo, una polea simple permite hacer un esfuerzo hacia abajo para levantar un peso, lo que facilita el levantamiento de la carga.
Grados de libertad de un mecanismo
Los grados de libertad de un mecanismo son el número de velocidades generalizadas necesarias para definir completamente el estado cinemático de un mecanismo.
Así pues, el número de grados de libertad de un mecanismo se calculan mediante la siguiente fórmula:

Donde:
 es el número de grados de libertad del mecanismo.
es el número de grados de libertad del mecanismo. es el número de sólidos o elementos que forman el mecanismo.
es el número de sólidos o elementos que forman el mecanismo. es el número de grados de libertad de cada sólido. Si estamos estudiando el mecanismo en dos dimensiones cada sólido dispone de 3 grados de libertad, pero si trabajamos en tres dimensiones cada sólido tiene 6 grados de libertad.
es el número de grados de libertad de cada sólido. Si estamos estudiando el mecanismo en dos dimensiones cada sólido dispone de 3 grados de libertad, pero si trabajamos en tres dimensiones cada sólido tiene 6 grados de libertad. es el número de restricciones que impone el enlace k.
es el número de restricciones que impone el enlace k.
Cabe destacar que los grados de libertad de un mecanismo es un parámetro importante para definir su movimiento, ya que coincide con el número de ecuaciones que se necesitan para describir su movimiento.
Creo que son conceptos importantes de mecanismos y están bien resumidos y cualquier estudiante lo entenderá de forma más rápida.